次世代マルチベネフィット型自動運転EV
背景
現在の物流システムは、ごみ収集・宅配・パトロールなど各事業者が個別に車両走行を行っています。今後、人材不足や過疎地域の拡大に伴い、より効率的な『ワンサービスマルチベネフィット』の概念をもった物流システムが求められています。
目的
次世代型廃棄物収集システムにつながるマルチベネフィット型自動運転技術の開発と実証を行っています。
仕様
- 自動運転と手動運転切り替え可能
- 続航距離 約40km/回・フル充電
- フル充電時間 約2~4h/回
- 自動運転機能:障害物検知、自動ブレーキ、停止、発進、障害物を避けて走行可能
- 乗用モジュール:1~2人乗り
- 搬送モジュール:ごみ箱
- 自動運転システムの構成:制御システム、検知システム(レーザー、レーダー、カメラ)、GPS
- プラッグ&プレー式構成(組み立て可能により搬送が便利)
- 画像認識対象物:人、車、樹木、道路、歩道、標識(一部)
- シャシー:カーボンファイバー&アルミ合金
- 車体:アルミ合金
- リチウムイオン電池(モジュール式 4~8個構成)

自動運転EV(プロトタイプ)
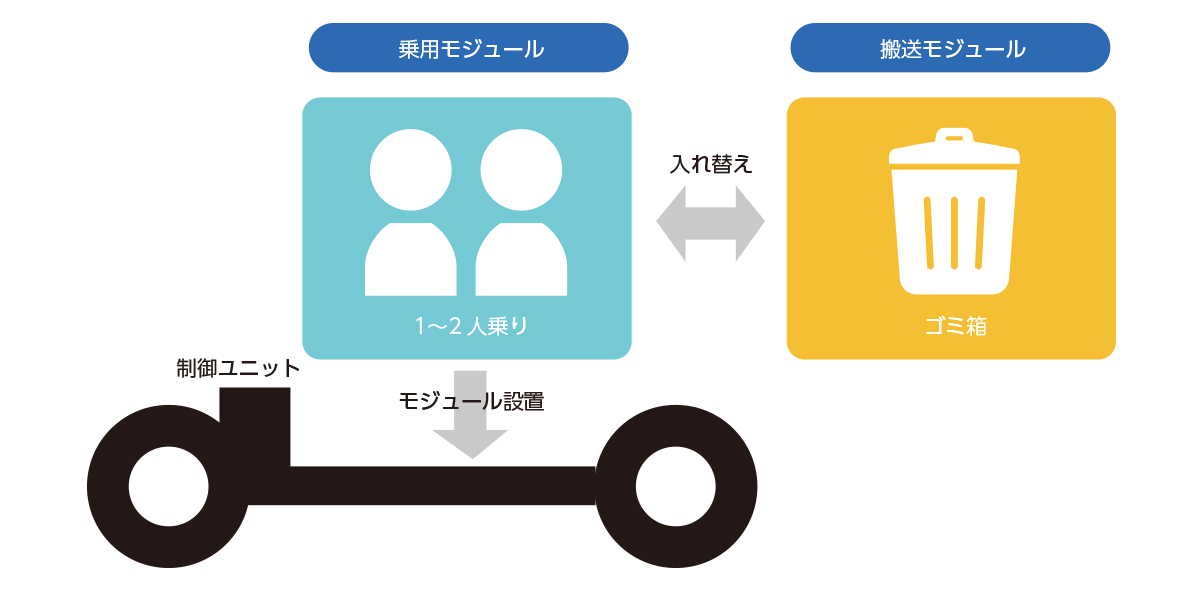
車両構成のイメージ
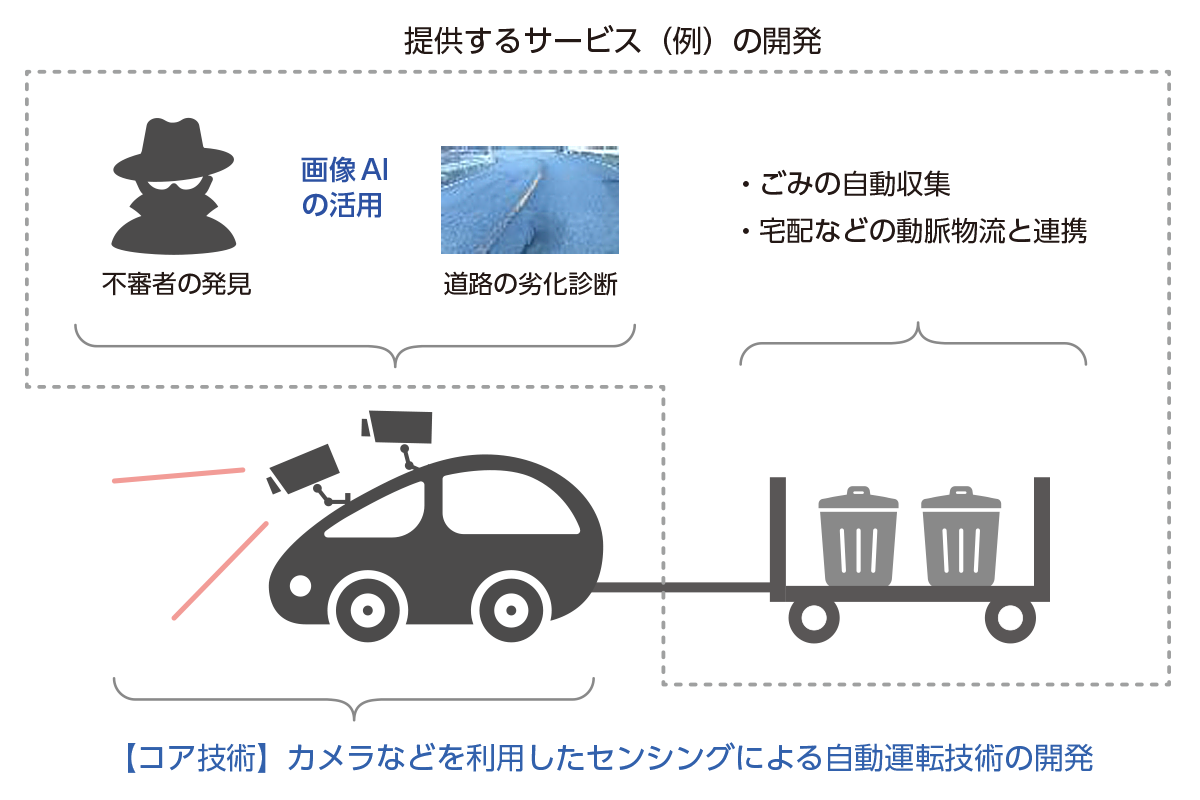
マルチベネフィット型自動運転車両(イメージ)